How to use this
Calculator
Problems - eCalc does not work? Find a Trouble
Shooting Guide here...
For explanatory videos and tutorials visit and subscribe our
growing
YouTube Channel. This Multicoper Calculator supports you in choosing an adequate motor setup for your electric
RC Multicopter with fixed pitch Propellers. it is suitable
for flat and coax configurations. Always define the frame
size first - then the propulsion with eCalc and use the largest
possible propeller diameter. Calculation
with available components:
- Enter the all up weight (incl. Camera), number of rotors and
the configuration - read the hints regarding flat
vs. coax...
- Enter the environmental numbers (Field Elevation, Air Temperatur
& Air Pressure (QNH)).
- Choose the Battery from the drop down list and adjust
the numbers of cells in serial and parallel.
- Choose the ESC from the drop down list.
- To find the required KV range use the Prop-KW-Wizard and
Search function. Choose the motor manufacturer and type from the drop down list..
- Choose the type of propeller with Diameter and Pitch. Use
always the largest possible Diameter for your frame for best
efficieny. If you
are using a folding prop enter the effective diameter including
the (twisted) yoke.
- Enter your Gear Ratio ( = Propeller Pinion Teeth : Motor Pinion
Teeth).
- Press the Button [calculate].
- Aim for a Hover Throttle (linear) of less than
- 70% for camera
platforms
- 60% for aerial photygraphy
- 50% for FPV
aerial explorer
- 45% for FPV Race Copters
Find a more in depth
tutorial here... (by Michael Kelly)
# of rotors:
Total number of Rotors and
there arrangement respectively configuration:
- flat: one
rotor on each arm
- coaxial: two
identical counter-rotating motors using same
prop on
each arm
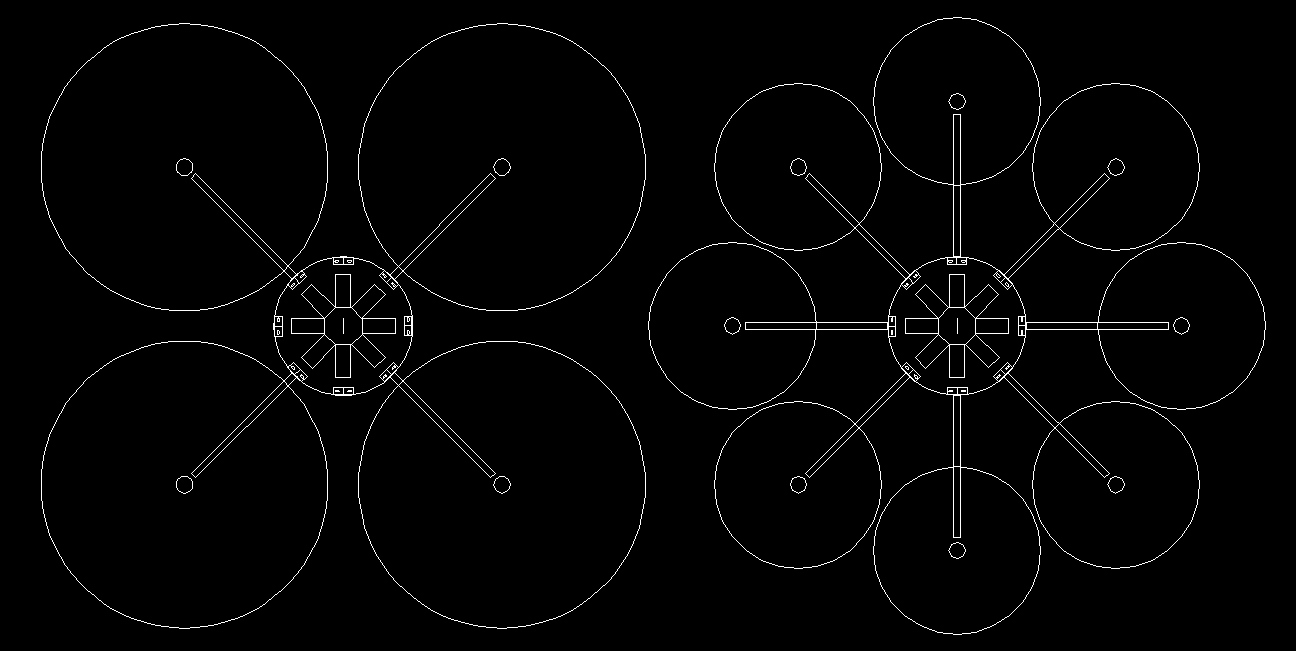
Frame Size:
The size of the frame is defined by the distance of the two
opposite motors (X) or double the arm length from center to motor (Y).
eCalc does a plausability check for the Propeller Tip Clearance
between the Propellers (but not to the center hub!) provided the frame
is full symetric.
Model Weight (incl. Drive / less Battery / without Drive):
You can chose whether your entry is the
- All Up Weight
(incl. Drive)
- the empty weight (without Battery) - the battery
weight will be added to
your entry
- the basic weight
(without Drive) - then the chosen Components
(Battery, ESC, Motor) weight will be added
to your entry.
Example for a Quad: «without Drive» adds to your weight entry
1xBattery, 4xESC, 4xMotor, +10% (e.g. for Prop).
Accessories:
you may define the weight of
additional accessories (e.g. camera, gimbal, light,...) and the
corresponding current consumption if supplied by flight battery. Use
current drain=0A for accessories supplied by own battery.
If you
use solar panels to prolonge flight time insert the current delivery
from solar panel as negative value e.g. -4A FCU Tilt limit:
Most FCU (Flight Control Units) or flight modes do limit the maximum
tilt for a better controlability. You can choose the tilt limit of
your FCU for a more accurate result of the max. horizontal Speed.
Battery Charge State:
as the battery voltage does decrease over its discharge cycle you
can choose the state of your battery at measurement for better
comparison:
- full: battery is fully charged and has low charging cycles (use
only to evaluate short term motor peak values).
- normal: average battery discharge voltage. All resultas are average values
over a discharge cycle.
- low: battery voltage with about 25% remaining capacity (use only
to evaluate the motor end of
flight values). Battery max. discharge:
This
defines the maximum percentage of the total capacity be used for a
flight (=used capacity). This is the base for all flight time related
calculations.
Remark: Never ever deep discharge a LiPo Battery
- aim for at least 10% remaining capacity after flight.
Battery performance in cold weather:
The internal
Resistance of a LiPo battery variies with it's chmerstry temperature.
If cold outside temperature leading to chemerstry temperature below
20°C you must expect degraded performance during operation.
Pre-heating the cells to 20...30°C may help to improve the performance
in cold weather operation.
Currently eCalc does not consider the
adverse affect of cold chemestry.
Choice of ESC:
Remember the ESC is able handle the
max. rated current only under these circumstances:
- with
efficient cooling airflow
- at full throttle (no pulse width
modulation active)
We suggest to plan for additional headroom of
- 20% for inefficient cooling airflow
- 40% for convective
cooling
- 20% if used in partial load
Remark: These
are rules of thumb and must be confirmed by temperature measurements.
Motor Cooling Guideline:
The motor cooling gets
efficient with a steady air stream along the motor case. The higher
the volume of air the better the motor gets rid of the heat. Here some
guidelines to the cooling options:
- Excellent:
very high air flow along the motor
(e.g. due open
mounting, forced ventilation (edf), redirected air flow to motor)
-
Good: normal air flow along motor
(e.g. vent holes or additional fan)
- Medium: low
air flow
(e.g. in lee of large spinner)
-
Poor: convective air flow in wide fuselage
- Very
poor: convective air flow in narrow fuselage
(e.g. hotliner with no venting)
However, in real live your motor
case should never ever exceed 80°C/180°F otherwise
you run into risk of overheat and even burning the motor. Prop-KV-Wizard:
The Prop-KV-Wizard is a helpfull and powerfull tool to
- find the
largest propeller for your frame size - the bigger the prop the more
efficient is the hover performance.
- evaluate the recommended
motor KV range as starting point for your
calculations
For full symetric frames the wizard does assure the propeller tip clearance between
props but NOT the center hub clearance as this depends on
the frame make. the right propeller:
the
bigger the total disc area (propeller diameter) the more efficient
does your copter hover, but the slower gets the control responce.
Propeller with a Pitch to Diameter ratio greater than 0.667 tends to
stall with increasing load. A stalling propeller blade might lead to
loss of control.
Therefore aim for a Pitch to Diameter ratio of
less than 2/3.
Be carefull with a high ratio on your race copter.
Even a setup works on one (lighter) copter it might end up in loss of
control on another (heavier) copter!
Folding Propeller:
If you are using a yoke wider than standard (see below) just add the
difference to the standard yoke to the diameter. Always use the effective propeller
diameter (Tip to Tip). Standard Yoke for
- Aeronaut Blades is 42mm/1.65"
- GM Blades is 32mm/1.26"
- Graupner Blades is 42mm/1.65"
- Leomotion Blades is 32mm/1.26"
- RFM Blades is 42mm/1.65"
- eflight Blades is 36mm/1.42"
Generic Propeller
By selecting a Generic (thin,
notmal, wide) Propeller from the list. eCalc dynamically calculates
the propeller constanst PConst to match best a unknown or not listed
prop. Calculation with custom components:
You can use any Battery, ESC, Motor or Propeller as long as the
technical data are available. Choose «custom» in the respective drop
down list and enter all the required data in fields right
of it. (Important: the parameter for the
Battery are required for a single cell)
When using Custom Components only use manufacturer
data or own measurements. Do never ever assume parameters or derive
parameters from similar motors as inaccurate parameters will lead to
inaccurate results. Evaluate Motor Resistance: Using an ohm meter
is a bad idea, as you also will measure the contact resistance! For
better results use the Kelvin 4-wire method. Evaluate no-load current and Kv: run your motor
without any prop at full throttle on a 3s or 2s battery (Voltage must
be below max allowed Voltage of the manufacturer) and measure the
resulting no-load current, voltage and rpm. Calculate
now Kv = rpm / Voltage.
Warning:
Do run your motor under no-load condition only for a very limited time
(<10s) as waste power is high and a motor may overheat!Logger
and Watt Meter:
Logger and Watt Meter values du correspond
to
Voltage = eCalc Battery Voltage Result
Current = eCalc Motor
@ Maximum Current
Wattage = not desplayed in eCalc (multyply the
above two values)
Note:
Before using logging device - especially when integrated into the ESC -
make a reference measurement with a quality multimeter to calibrate your
logger. In some cases we have experienced deviation of 25% or
even more to the reality. Battery Custom data:
As a reminder these input data are for a single cell of your battery
pack. Export Data
(for members only when logged in):
The calculated results may be
exported to any spreadsheet application (e.g. Excel) that may read CSV
files (comma separated).
[Add >>] adds the actually displayed data
to the export file.
[Download .csv (x)] downloads the CSV file to
your computer. (x) indicates the number of setups in the file.
[<<
Clear] deletes all the data in the prepared export file.
Share or Save your Setups (for members only):
If you would like to share or save a
designated setup use the [share] button.
eCalc reloads the
prarametrized link (url, page) with your settings preselected. You may
re-calculate, save the link in your Browser favorites/bookmarks or
copy/past the link for sharing your setup.
By calling this link
eCalc will preselect your components for calculation. Print:
Best results for printing eCalc results on paper are acheved with
these printer settings:
FireFox & Safari: Portait
Chrome &
Explorer: Landscape |
|
Wie setzten Sie
den Calculator ein?
Probleme - eCalc funtioniert nicht? Hier finden
Sie Problemlösungen....
Für erklärende Videos und Anleitungen besuchen und abonnieren Sie
unseren
stetig wachsenden
eCalc YouTube Kanal.
Dieser Multicopter Calculator unterstützt Sie bei der Wahl eines
elektrischen Antriebs für ihren Multicopter/Drohnen mit
Starr-Propeller. Damit können Konfigurationen mit einem
Propeller (flache) oder zwei Propeller (coacial) pro Arm
berechnet werden.
Definieren Sie erst die Rahmengrösse - dann erst den
Antrieb mit eCalc mit dem grösst möglichen Propeller-Durchmesser.
Berechnung mit vorhandenen Komponenten:
- Geben Sie das totale Fluggewicht (inkl. Kamera) und Anzahl Rotoren
und deren Anordnung Ihres
Multicopters ein - lesen Sie mehr zum Thema
coaxial vs. flacher Konfiguration...
- Geben Sie die Rahmenbedingungen (Flugplatzhöhe, Temperatur) ein.
- Wählen Sie Ihren Akku aus und geben die entsprechende
Konfiguration des Akkus ein (Anzahl Zellen seriell bzw.
parallel).
- Wählen Sie Ihren Regler bzw. Steller.
- Um das optimale KV Intervall zu finden benutzen Sie den
Prop-KV-Wizard sund die Such-Funktion. Wählen Sie Ihren Motor aus der Hersteller- und Typenliste
aus.
- Wählen Sie Ihren Propellertyp aus und geben den Durchmesser und die
Steigung/Pitch ein. Nutzen See entsprechend Ihrer Rahmengrösse
stehtst den grösst möglichen Durchmesser für besten Wirkungsgrad. Falls Sie einen Klapp-Propeller verwenden
geben sie den effektiven Durchmesser inkl. (verschränktem)
Mittelstück ein.
- Geben Sie Ihr Untersetzungsverhältnis ein ( = Anzahl Propritzelzähne : Anzahl Motorritzelzähne)
- Drücken Sie den Knopf [berechnen]
- Wir empfehlen eine Regleröffnung von weniger als
- 70%
für Kamera Plattformen
- 60% für dynamische Luftaufnahmen
- 50% für FPV Luftaufnahmen
- 45% für FPV Race Kopter
Ein
bebilderte Anleitung finden Sie hier.... (englisch, von Michael
Kelly)
Anz. Rotoren:
Totale Anzahl der Rotoren und
deren Anordnung:
- flach: ein Rotor pro Arm
- koaxial: zwei identische, gegenläufig drehende Motoren
(mit gleicher Luftschraube) pro Arm
Rahmengrösse:
Die Rahmengrösse ist definiert durch die Distanz zwischen den
gegenüberliegenden Motoren (X) oder die doppelte Armlänge vom
Zentrum zum Motor. eCalc überprüft die Propellerfreiheit zwischen
den Propellern (aber nicht zur zentralen Plattform!) für
voll-symetrische Rahmen. Modellgewicht (mit Antrieb / ohne Akku / ohne Antrieb):
Sie können Wählen ob ihre Gewichtsangabe dem totalen Abfluggewicht
(inkl. Antrieb) enspreicht oder das Abfluggewicht aus Ihrem
eingegebenen Leergewicht (ohne Akku) bzw. Rohbaugewicht (ohne
Antrieb) und den gewählten Komponenten errechnet
werden soll.
Zubehör:
Gewichtsangaben des Zubehörs (z.B.
Kamera, Gimbal, Licht,....) und dessen Stromverbrauch - falls vom
Flugakku versorgt - können definiert werden.
Geben Sie Stromverbrauch=0A
ein, wenn das Zubehör über eine separate Stromversorgung verfügt.
Sollten Sie die Flugzeit mit Solarpanelen verlängern, gben Sie die
Stromzufur der Panelen als negativen Wert ein, z.B.
-4A max. FCU Neigung:
Viele Flug Controler (FCU) oder Flug Modi limitieren die maximale
Nick-Neigung für eine bessere Stabilität. Da diese einen direkten
Einfluss auf die erreichbare max. Gewindigkeit im horitontalflug
hat, kann sie nun entsprechend der FCU Limitationen limitiert
werden. Some FCU (Flight Control Units) or flight modes do limit
the maximum tilt for a better controlability. You can choose the tilt
limit of your FCU inorder for a more accurate result of the max.
Speed.
Akku Ladezustand:
Da die von der Batterie abgegebene Spannung über einen
Entladezyklus sukzessive abnimmt, wird sie auch je nach Ladezustand
einen unterschiedlichen Messungwert liefern. Wählen Sie den
ensprechenden Ladezustand um einen Vergleich mit Ihren Messungen zu
machen:
- voll: Der Akku ist voll geladen und weist wenige Ladezyklen
auf
(damit lassen sich kurzzeitige Motoren-Spitzenwerte ermitteln).
- normal: mittlere Akkuspannung. Alle Resultate entsprechen dem Mittelwert
über einen Entladezyklus.
- tief: Akkuspannung bei rund 25% Restkapazität (damit lassen sich
die Motoren-Werte am ende eines Fluger ermitteln).
Batterie max. Entladung:
Definition wieviel
Prozent der gematen Kapazität wärend dem Flug verbraucht wird (=
genutzte Kapazität). Alle Flugzeiten basienren auf dier prozentualen
Entladung.
Anmerkung: LiPo Akkus sollten nie tiefentladen
werden - nach dem Flug sollte mindestens 10% der Kapazität im Akku
verbleiben. Batterie Leistung bei kaltem Wetter:
Der Zellen-Widerstand nimmt bei niedrigen Zell-Chemie-Temperaturen
massiv zu. Dies kann bei kalten Aussentemperaturen zu merklichem
Leistungseinbruch führen, wenn die Zell-Chemie nicht auf
"Betriebstemperatur" gebracht wird. Ein Vorwärmen der Zellen auf
20...30°C vor Gebrauch verbessert die Zellenleistung bei kaltem
Wetter.
eCalc berücksichtigt den Effekt kalter Zell-Chemie aktuell
nicht. Regler-Wahl:
Maximale
Strom-Angaben auf Reglern sind oft nur unter folgenden Bedingungen
zulässig:
- bei effizientem kühlenden Luftstrom
-
voll durchgeschaltet (keine Puls-Weiten-Modulation aktiv)
Folgende
Reserven sind empfehlennswert:
- 20% bei schlechtem
Kühlluftstrom
- 40% bei konvektiver Kühlung
- 20%
für Teillastbetrieb
Anmerkungen: Dies sind Faustregeln und
müssen mit einer Temperatur-Messung verifiziert werden.
Motorkühlung - Empfehlung:
Mi einem konstanten
Luftstrom wir eine effiziente Kühlung dess Motors sichergestellt. Je
höher das Luftvolumen desto einfacher kann die Abwärme abgeführt
werden. Hier unsere Empfehlung bzgl. Kühlungsoptionen des Motors:
-
sehr gut: hoher Luftstrom entlang des Motos.
(z.B. auuserhalb des Rumpfes. Zwangslüftung in Impeller oder
durch Leitbelche)
- gut: normaler Luftstrom
entlang des Motors
(z.B. durch Lüftungslöcher oder
zusätzlichem Lüfter)
- mittel: geringer Luftstrom
entlang des Motors.
(z.B. im Windschatten von grossen
Spinnern)
- gering: konvektiver Luftstrom in
weitem Rumpf
- sehr schlecht: konvektiver
Luftstrom in engem Rumpf
(z.B. im Hotliner-Rumpf ohne
jegliche Lüftung) Prop-KV-Wizard: (ab Version 6.60, ende Mai)
Der Prop-KV-Wizard ein hilfreiches Werkzeug um
- um die grösste
Luftschraube für Ihre Rahmengrösse zu finden - je grösser
die Luftschraube um so besser ist ihre Schwebe-Leistung.
- ein
Motor-KV-Intervall als optimalen Ausgangspunkt für weitere
Berechnungen zu ermitteln.
Für voll-symetrische Rahmen stellt
der Wizard die
gegenseitige Propellerfreiheit sicher nicht aber die Freiheit zur
zentralen Aufnahme, da diese vom Rahmenfabrikat abhängt.
der richtige Propeller:
Je grösser die
Propellerfläche (Propellerdurchmesser) desto effizenter ist das
Schweben, desto träger wird jedoch die Regelung
Bei Propellern mit
einem Pitch-Durchmesserverhältnis über 0.667 kann der Lufstrom am
Propellerblatt abreissen und zu einem Kontrollverlust führen.
Wir
empfehlen ein Pitch-Durchmesserverhältnis von unter 2/3.
Vorsicht
ist geboten bei Renn-Koptern mit einem höheren
Pitch-Durchmesserverhältnis: Ein gut funktionierendes Setup von einem
(leichten) Renn-Kopter kann bei einem anderen (schwereren) Kopter zum
Kontrollverlust führen! Klapp-Proppeller:
Sollten Sie ein Mittelstück einsetzten, welches von der
Standartbreite abweicht, muss dies durch Anrechnung der Different
zum Standart-Propeller-Durchmesser berücksichtigt werden. Verwenden Sie
stehts den effektiven Propeller-Durchmesser (Spitze zu Spitze in
Zoll). Das Standart-Mittelstück für
- Aeronaut Blätter ist 42mm/1.65"
- GM Blades ist 32mm/1.26"
- Graupner Blätter ist 42mm/1.65"
- Leomotion Blades ist 32mm/1.26"
- RFM Blätter ist 42mm/1.65"
- eflight Blätter ist 36mm/1.42"
Generic Propeller
Wenn Sie einen Gemeric
(Thin, normal, wide) Propeller aus der Liste wählen, werden die
Propeller-Eckdaten Pconst dynamisch berechnet, damit sie eine
möglichst gute Annäherung für einen unbekannten oder nicht
gelisteten Propeller erhalten. Berechnung mit nicht vorgegebenen Komponenten:
Wenn Sie in Besitz der techn. Angaben sind, können Sie mit jedem
beliebigen Akku, Steller oder Motor eine Berechnung durchführen.
Wählen Sie dafür in der entsprechenden Liste «andere» aus
und geben die nötigen Daten in den rechts davon liegenden Feldern
ein. (Witchtig: Die Battery Daten müssen pro
Einzelzelle erfasst werden)
Bei der Verwendung eigener Komponenten sollten Sie
ausschliesslich Herstellerdaten oder eigene Messungen verwenden.
Gehen Sie nie von Annahmen aus oder leiten Sie die Daten nicht von
ähnlichen Komponenten ab, da ungenaue Parameter zu ungenauen
Resultaten führt. Bestimmung des Innenwiderstandes des Motors: Bei Verwendung
eines Ohm-Meters werden die oft sehr kleinen Widerstandswerte durch
den Übergangswiderstand verfälscht. Nutzen Sie
diese Methode. Bestimmung des Leerlaufstroms und Kv: Betreiben
Sie Ihren Motor ohne Propeller mit Vollgas an einer 3s oder 2s
Batterie (bitte respektieren Sie die max. Motorspannung des
Herstellers). Nun messen Sie den Leerlaufstrom, die
Spannung und die Drehzahl. Nun können Sie Kv =
Drehzhl / Spannung berechnen.
Achtung: Betreiben
Sie Ihren Motor nur kurz im Leerlauf (<10s), da die Verlustleistung
(ohne Prop) sehr hoch sein kann und der Motor zur Überhitzung neigt. Akku-Zellen Eingabedaten:
Die Eingabedaten für den Akku beziehen sich auf eine einzelne Zelle
Ihres Akku-Packs. Logger und Watt-Meter:
Logger und Watt-Meter Werte entsprechen den folgenden Resultaten:
Spannung = eCalc Batterie Spannung
Strom = eCalc Motor @ Maximum
Strom
Leistung = nicht angezeigt (entspricht der multiplikation der
beiden Werte oben)
Anmerkung: Wenn sie einen Daten-Logger verwenden -
insbesondere im Regler integrierte - machen sie eine Referenzmessung
mit einem Multimeter um den Logger zu kalibieren. Unsere
Erfahrung zeigt, dass Logger über 25% von einer realen Messung
abweichen können. Daten Exportieren
(nur für angemeldete Mitglieder):
Die berechneten Daten können mit
Hilfe dieser Funktion in ein beliebiges Programm exportiert werden,
welche CSV Dateien (Komma separiert) lesen kann (z.B. Excel).
[hinzufügen
>>] fügt die aktuell angezeigten Daten zur Export Datei hinzu.
[.csv herunterladen(x)] Die Export Datei wird runtergeladen. (x) zeigt die
Anzahl gespeicherten Antriebe in der Export Datei an.
[<<
löschen]
löscht alle in der Export Datei befindlichen Daten. Teilen
oder Speichern von Antrieben
(nur für angemeldete Mitglieder):
Sie können ein Antrieb teilen
oder speichern
mit Hilfe des Knopf [Teilen].
eCalc läd die Seite neu mit einem
parametrierten Link. Ihre Einstellungen werden damit automatisch
übernommen. Sie können nun den gewählten Antrieb erneut berechnen, den
Link in den Favoriten speichern oder copieren um mit jemandem ihre
auslegung zu teilen.
Mit Hilfe dieses Links werden die
Komponenten später automatisch zur erneuten Berechnung abfüllen. Drucken:
Zum Drucken Iher eCalc Ergebisse empfehlen wir folgende
Druck-Einstellungen in ihrem Browser:
FireFox & Safari: Hochformat
Chrome & Explorer: Querformat
|